Hey I'm Akshay!
I'm a deep learning researcher working on cutting edge deep learning applied to SPECT Imaging in the Radiology Dept. at
UMass Medical School. I hold a Masters degree in Robotics from Worcester Polytechnic Institute where I worked on my thesis under
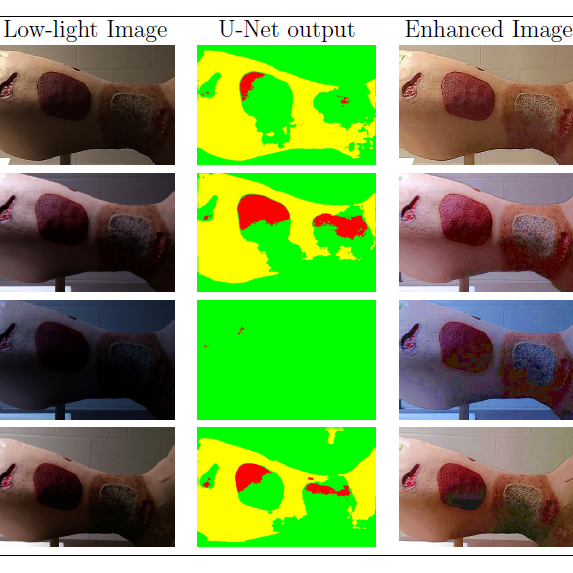
Prof. Emmanuel Agu for developing a lower extremity wound diagnostics app.
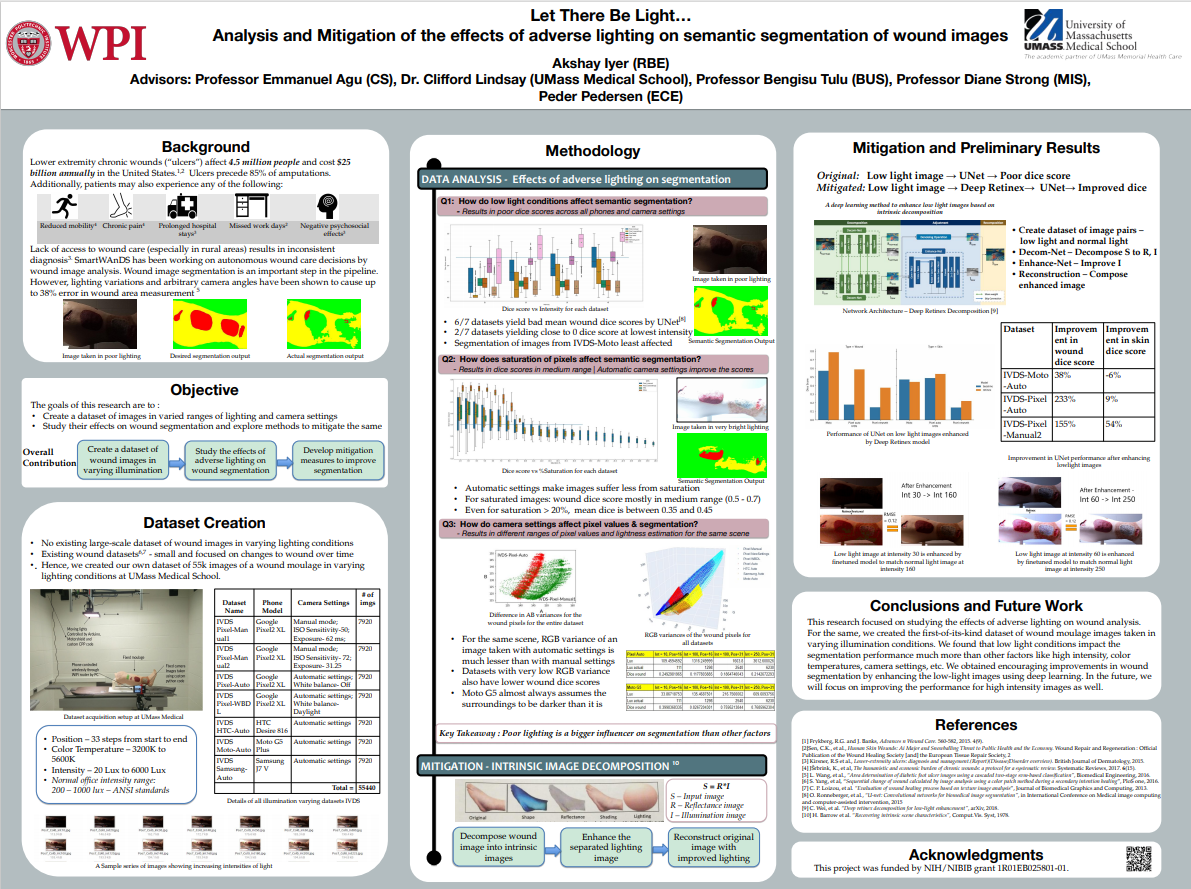
My work Involved studying and mitigating the effects of adverse lighting on
segmentation of wound images using intrinsic image decomposition.
Additionally, I have also been fortunate to work on some more interesting projects
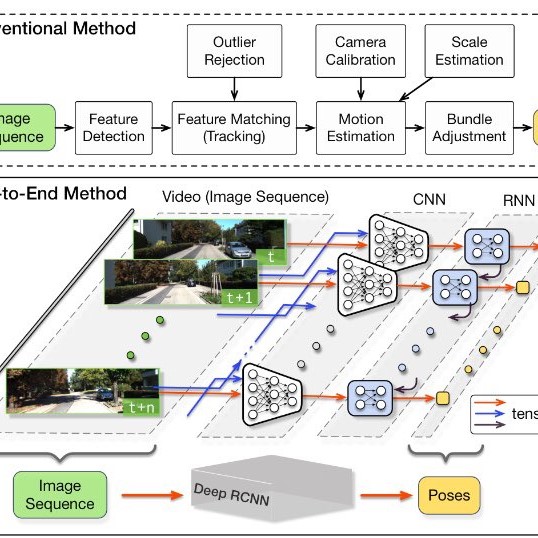
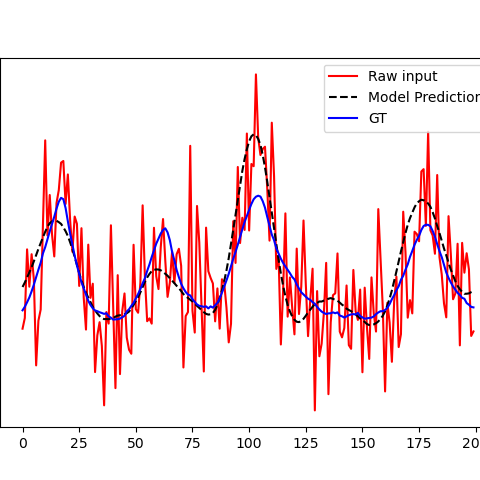
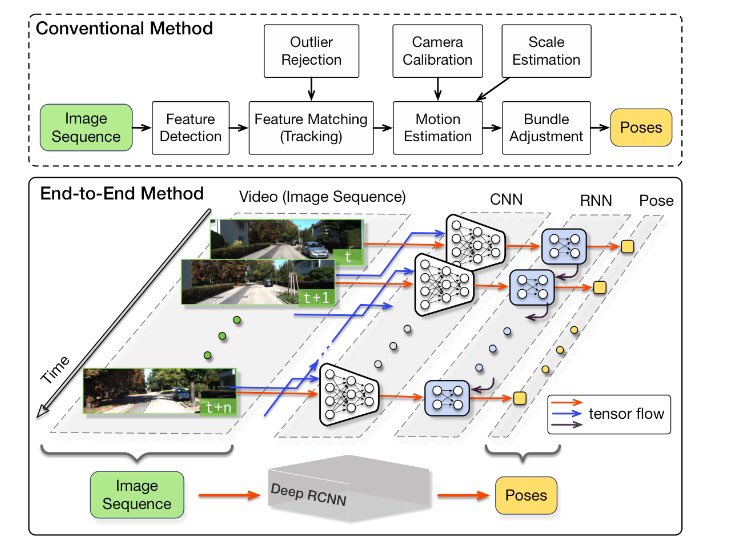
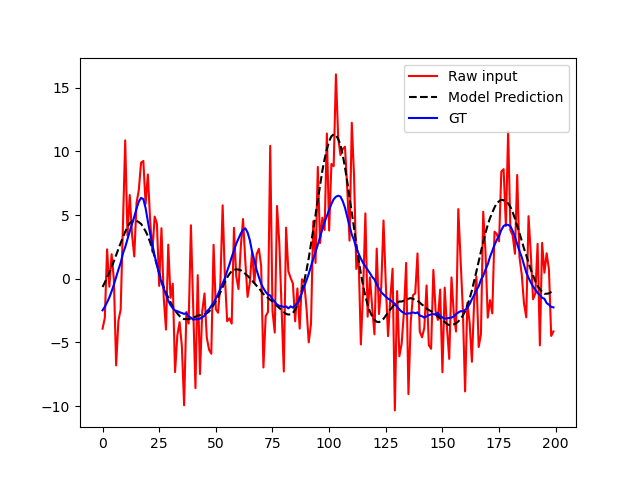
like estimating the egomotion of a vehicle using recurrent convolutional neural networks under
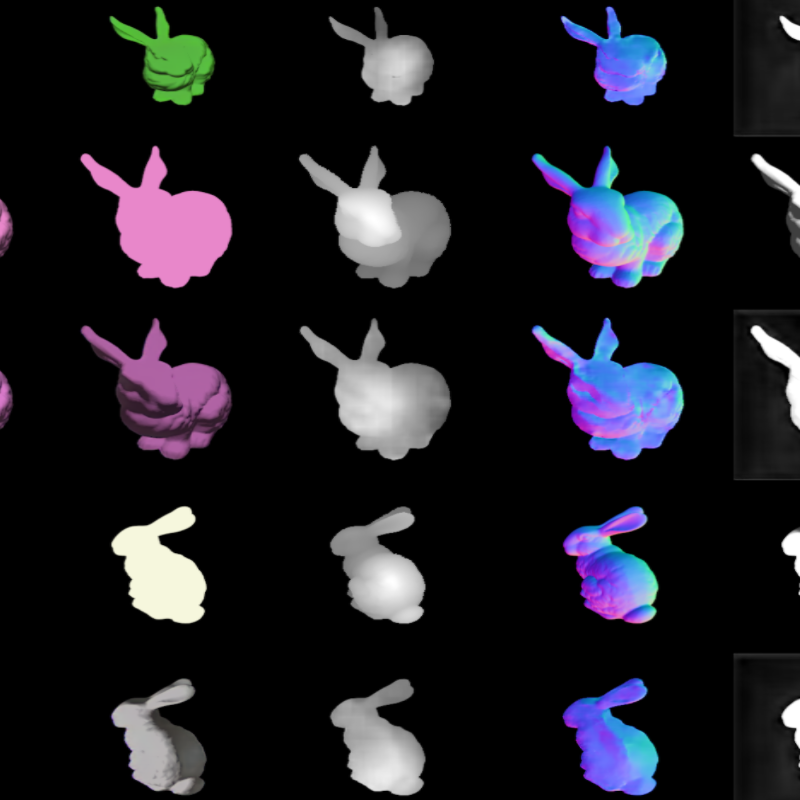
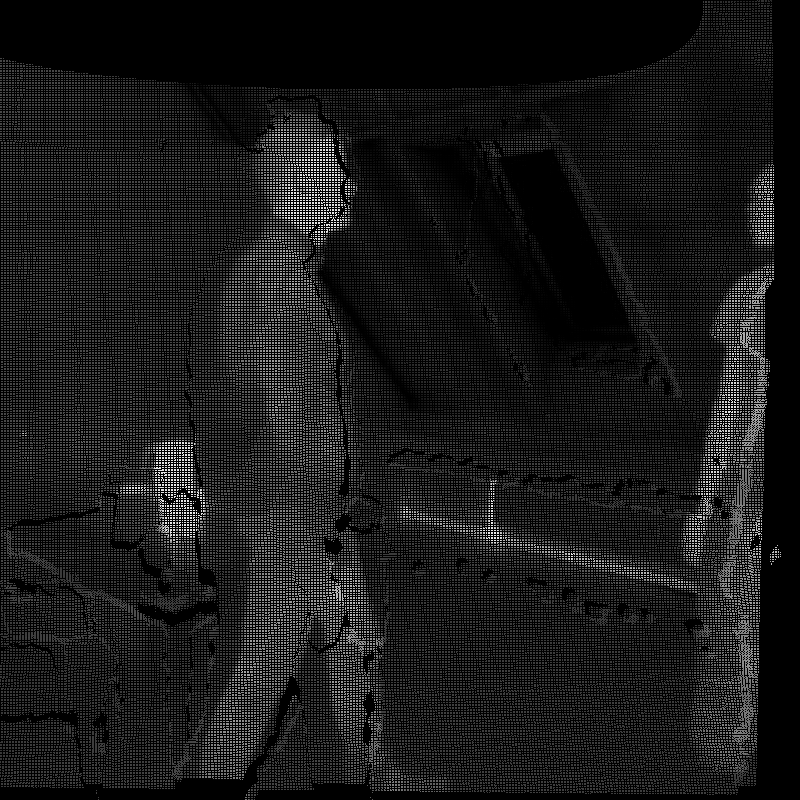
Prof. Riad Hammoud and creating 3D thermal models of indoor environments under
Prof. Shichao Liu
In my parallel universe, I have been exploring the hills of New England, taoist meditation, solving the cube, karaoke singing,
and devouring non-fiction.
Skills:
Languages: Modern C++, Python, Embedded C
Software/Libraries: Tensorflow, PyTorch, OpenCV, PyData, Weights&Biases, Flask, Slurm, HPC
Hardware: Arduino, Raspberry Pi, Depth and Thermal cameras
Core Competencies: CNNs, LSTMs, Conv-LSTMs, AEs, ML Deployment, Data Science
Contact Details
Akshay Iyer
Worcester, MA 01609
(508) 410-2937
akshay.iyerr@gmail.com
abiyer@wpi.edu